Suction Climbing Robot Prototype
Four-legged climbing robot prototype using Arduino control, mini vacuum pumps, and stepper-driven motion. Work focused on suction release control, wiring integration, and bench-level debugging.
My Role
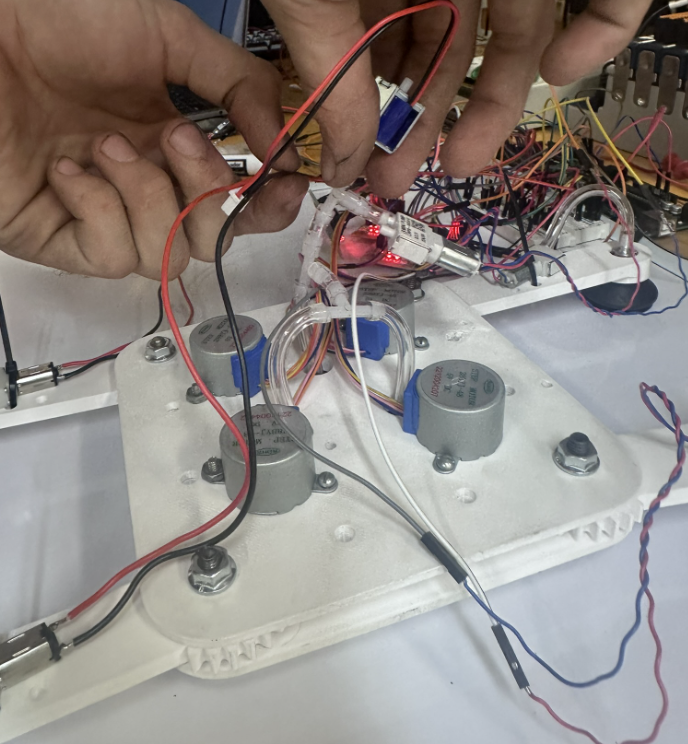
Focused on suction release control and system integration, including solenoid-vent release design, wiring and power integration, and debugging uneven suction behavior during live tests.
System Architecture
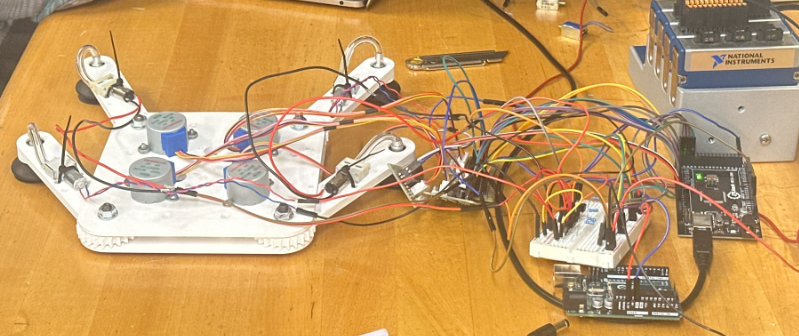
Stepper-driven legs with vacuum-pump suction feet controlled by an Arduino Mega. The controller coordinated attachment, detachment, and locomotion sequencing across the four legs.
Challenges
Primary challenge was inconsistent suction release timing between legs, likely caused by airflow resistance, leakage, and uneven vacuum distribution across the suction network.
Electrical Integration
Bench testing focused on voltage stability, transient load behavior, and current draw across the motor, pump, and solenoid subsystems.
My Role
Focused on suction release control and system integration, including solenoid-vent release design, wiring and power integration, and debugging uneven suction behavior during live tests.
System Architecture
Stepper-driven legs with vacuum-pump suction feet controlled by an Arduino Mega. The controller coordinated attachment, detachment, and locomotion sequencing across the four legs.
Challenges
Primary challenge was inconsistent suction release timing between legs, likely caused by airflow resistance, leakage, and uneven vacuum distribution across the suction network.
Electrical Integration
Bench testing focused on voltage stability, transient load behavior, and current draw across the motor, pump, and solenoid subsystems.
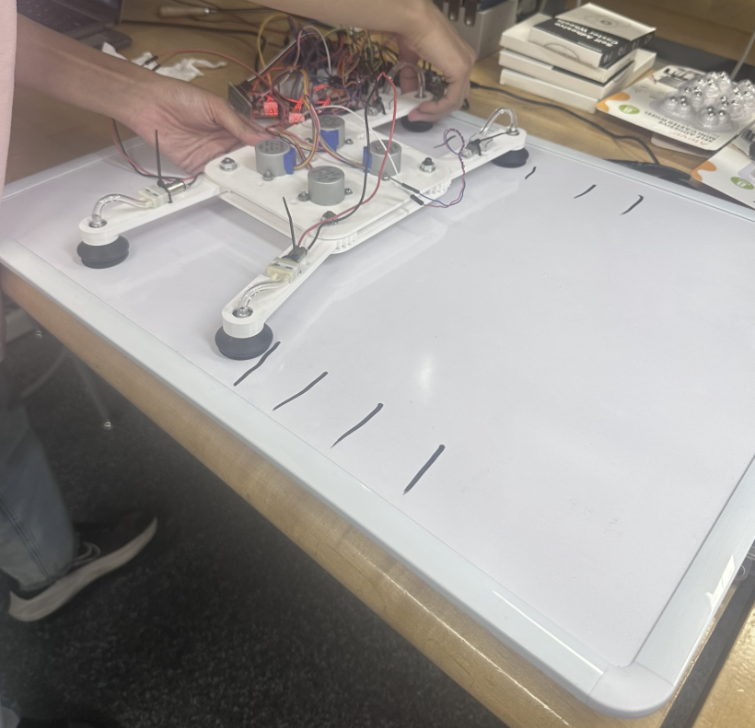
Underside Layout
Underside view showing suction mounting and early prototype wiring layout.
